{kind=link}
Last updated 2003-04-04
You may ask: why another Rotor-Controller ? I will try to answer that question.
I started with HRPT image reception in 2001. My first trials were with Arne van Belles's design of a 1.5 meter helical antenna. Satellite tracking was done by "free hands" until I had my first image lines on my computer. For better azimut and elevation adjustment I moved over to some tripod found in one of my waist boxes. But very soon I learned, I had to spend some money to buy a commercial antenna rotor system. So I bought a used Kenpro/Yaesu G-5600 combination of azimut-elevation rotors from some Radio Amateur with an AMSAT-DL computer interface included IF-100 ( costs were about 700,- Euro ). After proper setup everything worked as promised. But the tracking software, that came with the rotor package was not very user friendly. So I decided to switch over to InstantTrack, a very fast, old fashioned DOS software with a consistent user interface and -- very important -- batch mode capability. The combination of InstantTrack and IF-100 calls for a special driver TSR software which I obtained from AMSAT-DL as an executable file only. In principle ( Radio Eriwan, you know ? ) this worked ok, but...
1st: I wanted to run tracking software and the HRPT image capture software ( DOS version of Rob Alblas' HRPT.EXE ) concurrently on the same computer. InstantTrack is started first in batch mode and HRPT is started afterwards. The bad news is that HRPT in its graphical display mode hides any displayed information from the background tracker task, so I had to speculate about current satellite position during a pass or use a second computer.
2nd: I learned about the North-South stop problem of rotor systems which makes it impossible to track either north-bound passes or south-bound passes unless you switch to something called "flip-mode". To provide flip-mode, any rotor system must be able to control elevations from 0° to 180°. This unfortunately was blocked in IF-100 hardware as well as in the corresponding driver software. The hardware blocking could be resolved, softwareblocking not.
3rd: Since I am working my "space station" from my sleeping room ( yes, that is nearest to my antennas on our balcony ) the amount of equipment had to be limited. So I decided to use a notebook computer for tracking and image capturing. Do do this I need a either two parallel ports -- one for rotor control, the second for Alblas decoder -- , not available on standard notebooks or obtain a rotor controller with serial data input.
In conclusion I decided to develop a new rotor controller with the following design goals:
-- compatible with Kenpro/Yaesu rotor controller
-- full range of elevations from 0° to 180°
-- serial data input with open data protocol(s)
-- data protocol in readable ASCII character format so that use
of terminal software for rotor control and diagnostic purposes
is possible
-- continuous display of actual rotor position more precisely
than the Yaesu controller does
-- display of tracking data from computer to enable comparison
of credit-debit of my tracking system
-- cheep and easy construction
Since I am somewhat familiar with Microchips PIC 16f84, I decided to use that type of microcontroller in combination with a standard 2-line LC-Display, a two channel analog-digtital-converter IC and some glue components. Schematic of my controller and microprocessor firmware with sources included are available on the download page. I did not develop a printed circuit board but rather put all components onto a perfoboard and did the wiring on bottom side manually.
A software version for Yaesu 450° azimuth-rotors is also available.
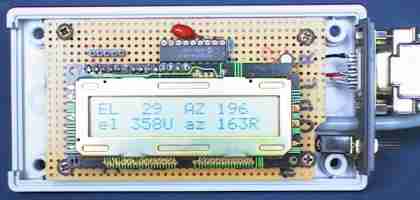
Top view of my controller, lid removed.
- first line on LCD shows "set-data" from PC in this
picture. In this case elevation "EL" and azimut "AL" to point
to Meteosat 7. Under other circumstances diagnostic messages
may be shown here.
- second line always shows actual rotor position data. In this
example 358 degrees of elevation, which actually means -2
degrees. This is the elevation stop as set by my
companion software ( see below ). Rotor is expected to move up
as indicated by letter "U". Actual azimut position is 163
degrees. Rotor therefore is expected to move right as indicated
by letter "R".
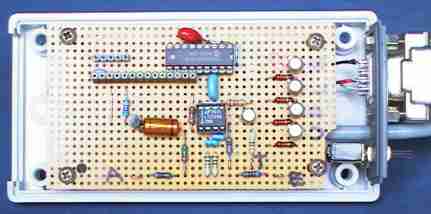
Top view with display module removed to show the small
amount of components needed.
So if you are an DIYer and need a new rotor controller, download schematic, firmware and companion software. All is free for hobby use.Companion software includes a TSR-driver for InstantTrack ( yes, I still use this reliable software for antenna tracking ), and some commandline programs written in Borland C to manually control antenna postion and set up the rotor controller. You can setup hysteresis of rotor movement in tenth of degrees, actual direction of azimut stop in degrees and actual direction of elevation stop in degrees. In most cases you will use stop directions to compensate for misalignments of some degrees of antenna line up as I dir for antenna elevation.
My use of azimut stop position is a little bit more tricky. Antenna alignment is done in a way that the antenna points to 163° degrees precisely when the rotor is at left stop. This information is put into my controller so that it knows at left stop ( 0 Volts from the position potentiometer ) it actually points to 163°. !63° or more is the direction from which at my home location all north-west-bound passes of NOAA satellites start. 162° or less is the direction where all north-east-bound passes start. You will have to find out the proper direction in your case. You can do this very easily by using David Taylors's WXTRACK software. By this method you can -- and I do -- avoid antenna "flip-mode" for HRPT satellite tracking ( although my controller with its TSR driver is capable of that now ).
To construct this controller you should be somewhat experienced in electronics, especially with PIC controllers and at best should be able to program one yourself. Parts of the software are commented in German language, sorry for that, but this was easier for me. Main program with english language comments is now included in the package.
And now some more good news: instead of InstantTrack
you may use any other tracking software that supports either Easycomm-
or Yaesu-GS232-
serial protocols at a bitrate of 19200 bps. Yes my controller
is bilingual and understands both protocols. I successfully
tested both protocols with
David Taylors's WXTRACK software. WXTRACKin addition
supports automatic "flip-mode" which InstantTrack does not.
Meanwhile i have got some very positive feedback from people
around the world. Thank you to all who wrote. Steve
Blackmore sent his artwork for a PCB and his CAD drawings
of the schematic, which is now available on my download page. Bob Barnes
wrote an interesting article published in RIG-Journal Vol.
71 and gave me the honour to include my name as coauthor.
French speaking people may heve a look at LAURENT's home page, where
he compared different rotor-controllers.